
近日,生物医学工程学院青年教师杨润怀团队在国际期刊《高级材料科技(Advanced Materials Technologies)》(IF=7.8)上发表题为《3D打印内置微马达的光驱微型游动机器人(3D-Printed Light-Driven Microswimmer with Built-In Micromotors)》的论文。该院研究生陈引为第一作者。
微型游动机器人一直是医疗器械的热门研究领域,其技术的突破有望带来新的人机交互和机器人技术,为临床诊疗提供新的解决方案。其中,光控微纳机器人往往需要大功率且高精度的光源,尤其是其光源往往要小于机器人尺寸才能控制方向,因此限制了其在复杂体内环境的使用。
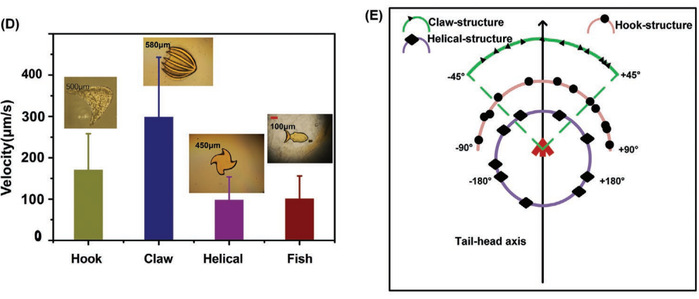
杨润怀课题组利用高精度3D打印平台结合跨尺度装配技术,提出了一种具备内置驱动马达同时具备了微米级不对称驱动结构的装配方案,利用机器人的结构实现了大面积可见光源(光斑面积大于1平方毫米,可直接由常见的商业荧光显微镜光源提供)下微型机器人的定向运动,为微纳机器人在无法精确照明的环境下实现运动奠定了基础, 并初步验证了其在肿瘤治疗上的前景。
杨润怀团队长期致力于智能3D打印技术以及微型柔性智能医用机器人驱动与传感领域的系统研发工作。(生物医学工程学院)

 TOP
TOP